Regardless of the system’s mass , gravity, inertia, and externally applied forces, this system is still restricted to a given range of motion.
Kinematics is concerned with the motion of objects, such as displacement, velocity and acceleration, but not the forces that cause the motion
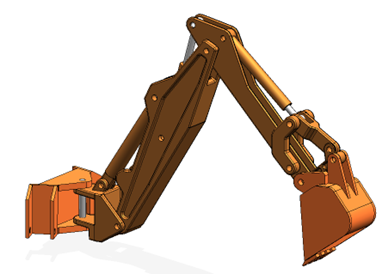
This system has 0 DOF, when motions are included on the actuators. Regardless of the mass of the system, the links will always move through a given (or defined) range of motion